在游戏开发中,需要使用到向量,三角函数之类的知识。先学会里面的概念,后续应用才会容易制作。
3d数学
1.笛卡尔坐标系(Cartesian)
2d坐标系:x,y
3d坐标系:x,y,z
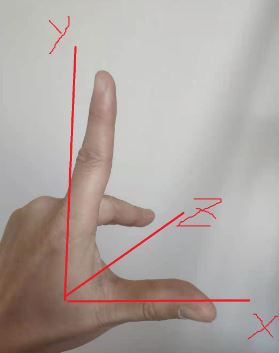
在3d坐标系里面有左手坐标系和右手坐标系。这个可能对人来说有直观认知上的区别,其实是不相悖。
右手坐标系
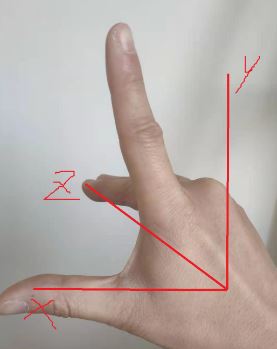
左手坐标系
附带:
极坐标系(polar coordinates)是指在平面内由极点、极轴和极径组成的坐标系。在平面上取定一点O,称为极点。从O出发引一条射线Ox,称为极轴。再取定一个单位长度,通常规定角度取逆时针方向为正。这样,平面上任一点P的位置就可以用线段OP的长度ρ以及从Ox到OP的角度θ来确定,有序数对(ρ,θ)就称为P点的极坐标,记为P(ρ,θ);ρ称为P点的极径,θ称为P点的极角。
极坐标系用于定位和导航。极坐标通常被用于导航,作为旅行的目的地或方向可以作为从所考虑的物体的距离和角度。
2.三角学
这块的知识属于初等函数。初等函数包含的有:
幂函数、指数函数、对数函数、三角函数、反三角函数、有理运算(加减乘除,有理数次乘方、有理数次开放)、有限次函数复合。
1.直角三角形三角函数概念
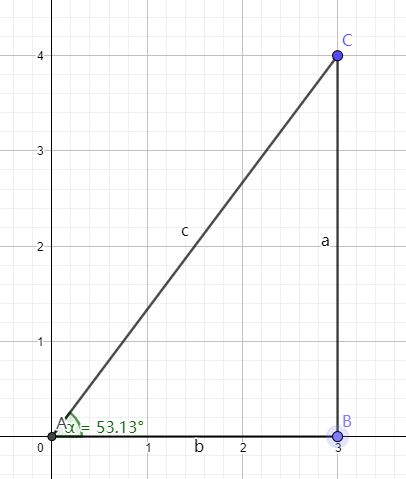
- 对边 Opposite(opp) y
- 邻边 Adjacent(adj) x
- 斜边 Hypotenuse(hyp) r
勾股定理(毕达哥拉斯定理)
$r=\sqrt{x^2+y^2}$
$5=\sqrt{3^2+4^2}$
$∠A 为\theta$
余弦 cosine
邻边比斜边。
$cos(\theta) = \frac{x}{r}$
正弦 sine
对边比斜边。
$sin(\theta) = \frac{y}{r}$
正弦余弦背诵的时候,按照字母排序,x < y ,cos < sin。
割线 secant
$\sec(\theta)=\frac{1}{\cos(\theta)}$
$\sec(\theta)=\frac{r}{x}$
余割 cosecant
$\csc(\theta)=\frac{1}{\sin(\theta)}$
$\csc(\theta)=\frac{r}{y}$
切线 tangent
对边比邻边。
$\tan(\theta)=\frac{\sin(\theta)}{\cos(\theta)}$
$\tan(\theta) = \frac{y}{x}$
余切 cotangent
邻边比对边。
$\cot(\theta) = \frac{1}{\tan(\theta)}=\frac{\cos(\theta)}{sin(\theta)}$
$\cot(\theta) = \frac{x}{y}$
反切线函数
反切线函数的反函数 arctangent
$\arctan(\tan(\theta)) = \theta$
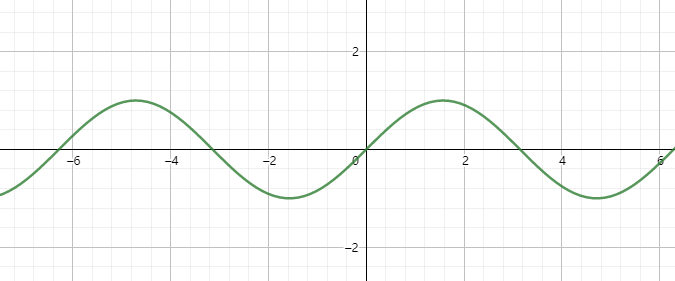
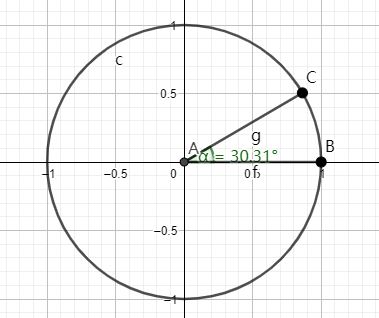
2.角度弧度
半径为1的园,全弧长为2$\pi$r。
$radian=degree*(\pi/180)$
$degree = radian*(180/\pi)$
角度是两条线段的夹角,弧度是两条线段和园相交的点,在圆弧上走过的距离。
角度使用360°,原因来自于日历。波斯日历就是360天。360能被整除的数字(不算自己和1)有22个数字。
3.三角恒等式
对称性恒等式
$$
\sin(-\theta)=-\sin(\theta), cos(-\theta)=cos(\theta),\tan(-\theta)=-tan(-\theta),\
\sin(\frac{\pi}{2}-\theta)=\cos(\theta), \cos(\frac{\pi}{2}-\theta)=\sin(\theta),\tan(\frac{\pi}{2}-\theta)=\cot(\theta)$$
毕达哥拉斯恒等式
这是由勾股定理推算出来的。
$$\sin^2\theta+\cos^2\theta=1, 1+\tan^2\theta=\sec^2\theta, 1+\cot^2\theta=\csc^2\theta$$
和或差恒等式
$$\sin(a+b)=\sin(a)\cos(b)+\cos(a)+\sin(b)\
\sin(a-b)=\sin(a)\cos(b)-\cos(a)+\sin(b)\
\cos(a+b)=\cos(a)\cos(b)-\sin(a)+\sin(b)\
\cos(a-b)=\cos(a)\cos(b)+\sin(a)+\sin(b)\
\tan(a-b)=\frac{\tan(a)+\tan(b)}{1-\tan(a)\tan(b)}\
\tan(a-b)=\frac{\tan(a)-\tan(b)}{1+\tan(a)\tan(b)}
$$
背诵的时候,只需要记住一半,其他的是符号相反。
等腰三角形恒等式
其实就是和或差恒等式公式里面a=b的情况下,推导出来的。
$$\sin(2\theta)=2\sin(\theta)\cos(\theta)$$
在阅读Detour源码里面有这样的应用。里面将会读取一个sin cos的一半做乘法。
$$\cos(2\theta)=\cos^2(\theta)-\sin^2\theta=2\cos^2(\theta)-1=1-2\sin^2(\theta)$$
$$\tan(2\theta)=\frac{2\tan(\theta)}{1-\tan^2\theta}$$
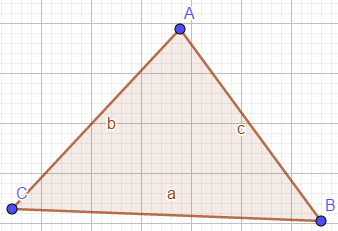
正弦、余弦定理
如果已知边长,已知角度,需要推算出未知边长度,就需要使用这个定理。而且是任意三角形。
- 正弦定理
$$\frac{\sin(A)}{a}=\frac{\sin(B)}{b}=\frac{\sin(C)}{c}$$
- 余弦定理
$$
a^2=b^2+c^2-2bc\cos(A)\
b^2=a^2+c^2-2ac\cos(B)\
c^2=b^2+b^2-2ab\cos(C)
$$
3.向量
向量计算应用于游戏中来计算位置,里面和三角函数也有关系。
向量和标量不一样,
标量(scale)只表示数值大小;
向量(矢量、vector)包含方向和数值大小。
举例:
速度、位移是向量
速率、长度是标量
零向量是指的长度为0,无方向的向量。
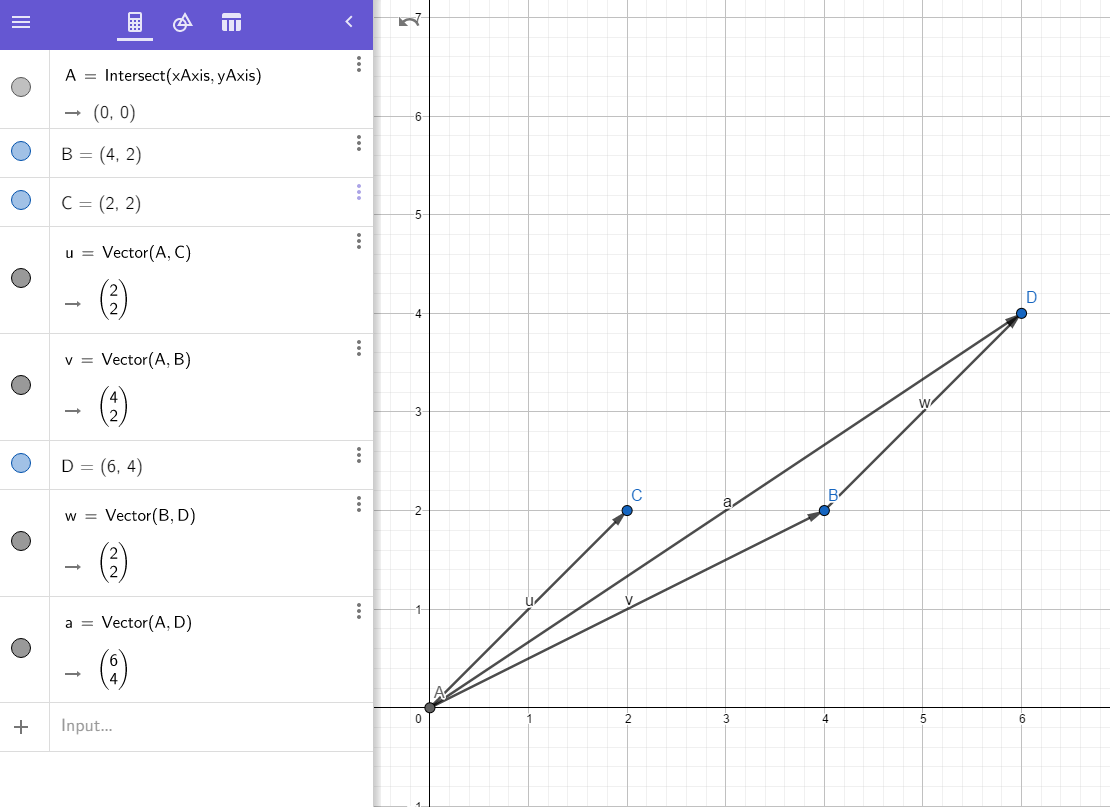
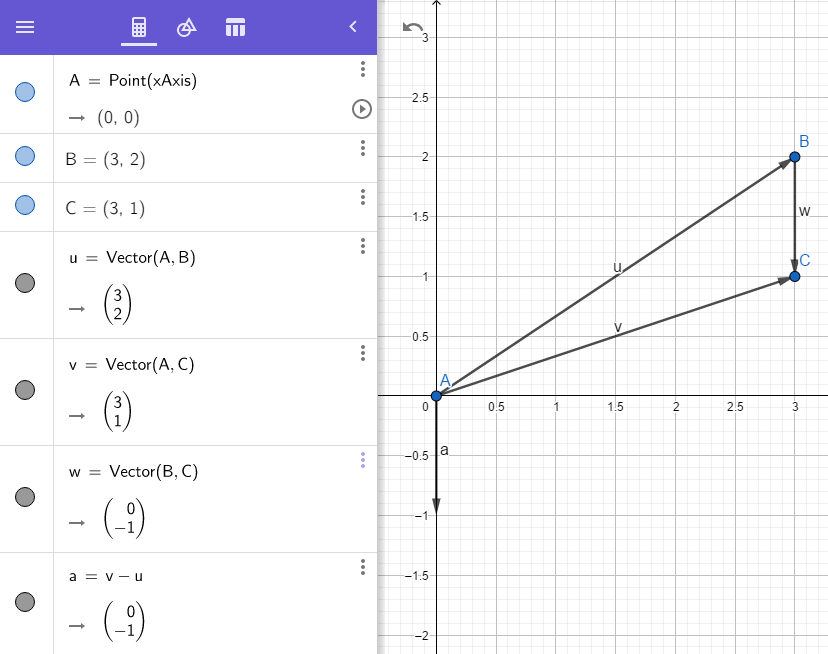
1.加法
将两个向量拼接成平行四边形,对角向量就是加法的结果。两个相同的向量相加,等于将向量长度增加一倍。
$$\vec{u} + \vec{v} = \vec{a} $$
2.减法
u向量-v向量,就是指的从u向量目的点指向v向量目标点
$$\vec{v} - \vec{u} = \vec{w} = \vec{a}$$
3.向量与标量乘
向量与标量乘法,将向量按照某个长度缩放,一般用于单位向量向前行进、缩回多少距离。
4.获取长度
获取向量从开始到结束的距离。从向量得到标量。利用勾股定理,向量记录的就是直角三角形斜边在x,y轴上的投影长度,斜边长度就是x,y的平方和的开方。
数学公式里面向量长度使用双竖线引用。
$$\left||\vec{v}\right||=\sqrt{a^2+b^2}$$
5.normalized
归一化需要将向量长度计算出来,然后将向量在各个维度的分量都除以长度。这样就能得到一个单位向量。归一化用一条竖线。
$$\vec{v}_{norm} = \frac{\vec{v}} {\left||\vec{v}\right||}$$
单位化的向量分量的几何意义
$$x=\cos(\theta)$$
$$y=\sin(\theta)$$
这个特性将会应用于计算位置。
6. Dot Product
$$\cos\theta=\frac{\vec{u} \cdot \vec{v}} {\left||\vec{u}\right||\left||\vec{v}\right||}$$
点乘能计算两向量的夹角的cos值。cos有一个特点,在取值±90°的值域都是>0。在游戏中,这种计算能很快判断一个怪物是否在玩家身后。这个函数不能判断左右,但是能判断前后。
7.cross produce
$$\sin\theta=\frac{\vec{u} \times \vec{v}} {\left||\vec{u}\right||\left||\vec{v}\right||}$$
叉乘用于算左右。sin有个特点,取值在0~179°都是>0。用找个特点能判定向量是在自己的左边还是右边。
叉乘需要有3个维度才有意义。
$$\vec{u}\times\vec{v}=\left|\vec{u}\right|\left|\vec{v}\right|\sin(\theta)n$$
u叉乘v之后结果是sin*u、v向量的分量。n就是垂直于u、v构成平面的垂直法线向量。
3D向量叉乘
$$
\left[\begin{matrix}
x_1\
y_1\
z_1
\end{matrix}\right] \times \left[\begin{matrix}
x_2\
y_2\
z_2
\end{matrix}\right] = \left[\begin{matrix}
y_1z_2-z_1y_2\
z_1x_2-x_1z_2\
x_1y_2-y_1x_2
\end{matrix}\right]
$$
2D向量叉乘
$$
\left[\begin{matrix}
x_1\
y_1
\end{matrix}\right] \times \left[\begin{matrix}
x_2\
y_2
\end{matrix}\right] = x_1y_2-x_2y_1
$$
性质:
点乘和叉乘在一起时,有限叉乘。
反交换(交换之后数值将会变成负数)
8.获取角度
将向量转换成弧度,向量无需归一化。百度百科atan2
$$
\angle\theta=\arctan(y,x)$$
$$\arctan(y,x)=\begin{cases}
\arctan(\frac{y}{x}), x >0\
\arctan(\frac{y}{x}) + \pi, y\geq 0, x\le 0
\end{cases}
$$
9.常用函数
1 |
|
实例
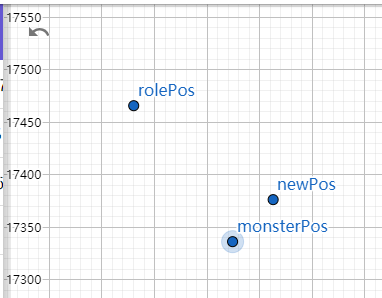
1.计算围绕role的怪物
先检查是否和其他怪物重合
按照±小角度开始偏移尝试是否能站
1 | # |
cmake定义文件
1 | cmake_minimum_required (VERSION 3.2) |
计算的位置,在坐标系上的位置
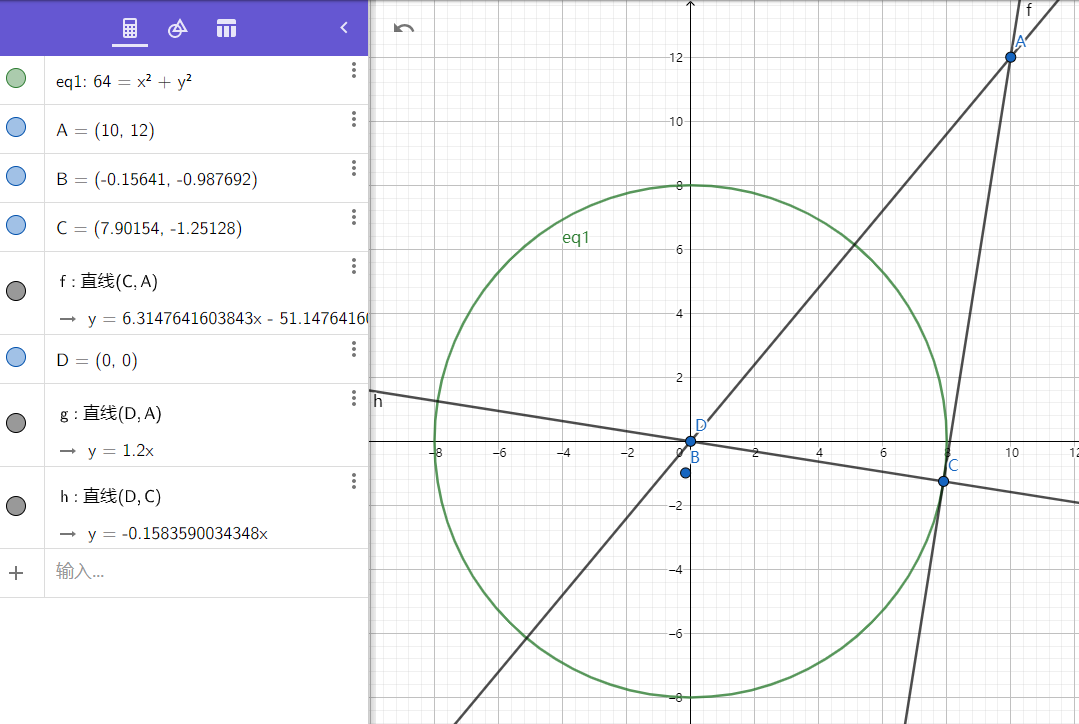
2.计算园外切线
利用三角函数来计算点对于圆的切线;
1 | void test_fun_fix_circle() |
效果:
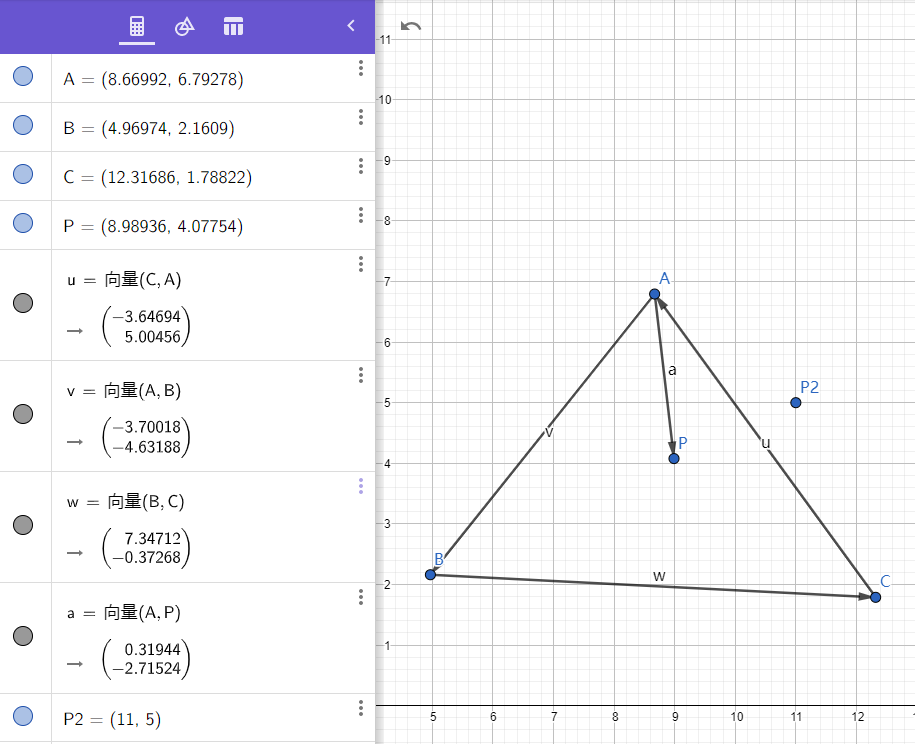
3.计算某个点是否为三角形内
原理在 b站 GAMES101-现代计算机图形学入门-闫令琪 38分钟处讲解了。
叉积是用于控制左右。如果获取的值域是正数左边,负数为右边。
利用的是,三角形三点按照顺时针的向量,以及p点的向量的叉乘永远是相同的象限的。
1 |
|
4.计算矩形内的一点
$$\begin{cases}
x’=x\cos(\theta)+y\sin(\theta)\
y’=-x\sin(\theta)+y\cos(\theta)
\end{cases} \tag{4.1}$$
原理和三角形检查一样。
先将一个矩形做偏移,旋转:
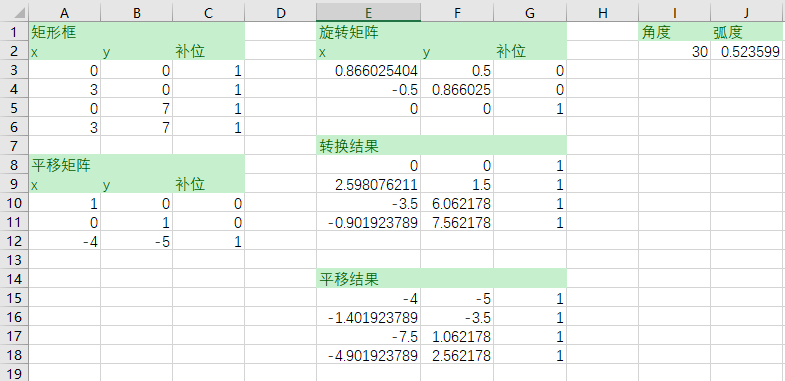
取两个点开始计算:
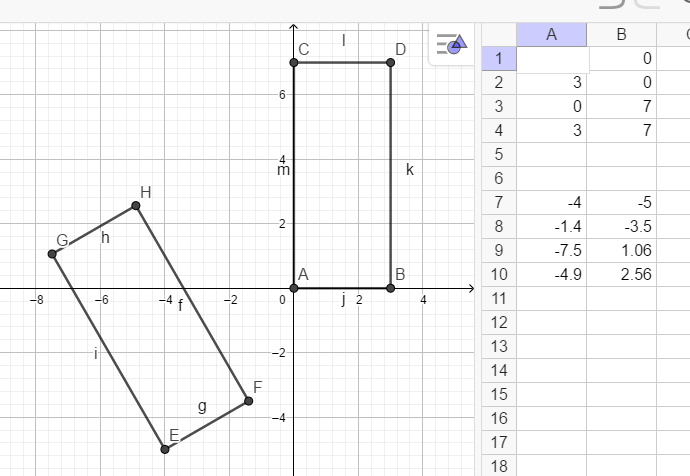
1 | void test_rect_inner() |
5.计算两个角度相差
这段代码是复制unreal engine4里面的。
1 |
|
大意就是将a0,a1两个角度(无论角度是不是±180°区间,这个角度是绝对角度)计算了之后,再次做减法,计算出角度为夹角度数,且夹角会保持在±180°之内。
6.角度格式化
// Utility to ensure angle is between +/- 180 degrees by unwinding.
1 | // 将度数限制在±180° |
7. 计算线段与圆相交
1 |
|
8.点的旋转
4.矩阵
1.概念
$$
\left|\begin{matrix}
1 & 2 & 3 \
4 & 5 & 6 \
7 & 8 & 9
\end{matrix}\right| \tag{A}
$$
矩阵是按照行列方式排列的数字。是线性代数里面中重要的数学概念。
描述矩阵一般都是说
$$r \times c$$
的矩阵。r是rows行(横着的条目算1个),c是column(竖着的条目算1个)
方阵就是行和列数目都是相同的。在3d运算中经常使用这种方阵
单位矩阵,对角线都是1,其余都是0。
$$
\left|\begin{matrix}
1 & 0 & 0 \
0 & 1 & 0 \
0 & 0 & 1
\end{matrix}\right| \tag{M}
$$
书写的时候,矩阵都是写成大写。M,A,R。手写的时候,矩阵的括号其实要写成圆括号(),印刷体中都是[]表示。
向量转换成矩阵可以成为 行矩阵、列矩阵。
2.矩阵运算
- 单位矩阵
主对角线数字都为1,其他位置都为0。
1.转置
$$
\left|
\begin{matrix}
1 \
2 \
3
\end{matrix}\right|\tag{M}
$$
$$
\left|
\begin{matrix}
1 & 2 & 3\
\end{matrix} \tag{A}\right|
$$
记作:
$$M^t=A$$
2.矩阵与标量乘
$$
Mk= k \left|
\begin{matrix}
m11 & m12 & m13\
m21 & m22 & m23\
m31 & m32 & m33\
\end{matrix} \right| = k \left|
\begin{matrix}
km11 & km12 & km13\
km21 & km22 & km23\
km31 & km32 & k*m33\
\end{matrix} \right|
$$
3.矩阵乘法
公式定义:
$$(AB){ij}=\sum{k=1}^p a_{i1}b_{1j}+a_{i2}b_{2j}+…+a_{ip}b_{pj}$$
公式分解:
$$
A*B= \left|
\begin{matrix}
a11 & a12 & a13\
a21 & a22 & a23\
\end{matrix} \right| * \left|
\begin{matrix}
b11 & b12 \
b21 & b22 \
b31 & b32 \
\end{matrix} \right|=\left|
\begin{matrix}
a11b11+a12b21+a13b31 & a11b21+ a12b22+a13b23\
a21b11+a22+b21+a23b31 & a21b12+a22b22+a23b32\
\end{matrix} \right|
$$
$$A*B=C$$
1、当矩阵A的列数(column)等于矩阵B的行数(row)时,A与B可以相乘。
2、矩阵C的行数等于矩阵A的行数,C的列数等于B的列数。
3、乘积C的第m行第n列的元素等于矩阵A的第m行的元素与矩阵B的第n列对应元素乘积之和。
在线性代数课程中,宋老师的7字口诀:
宋老师七字口诀:
$$A_{3 \times 4} B_{4 \times 5} $$
中间相等,取两头。
其实就是罗列矩阵的下标数字:
3,4,4,5
中间数字: 4,4相等,就能乘;
取两头: 3,5 这就是结果的矩阵的形状。
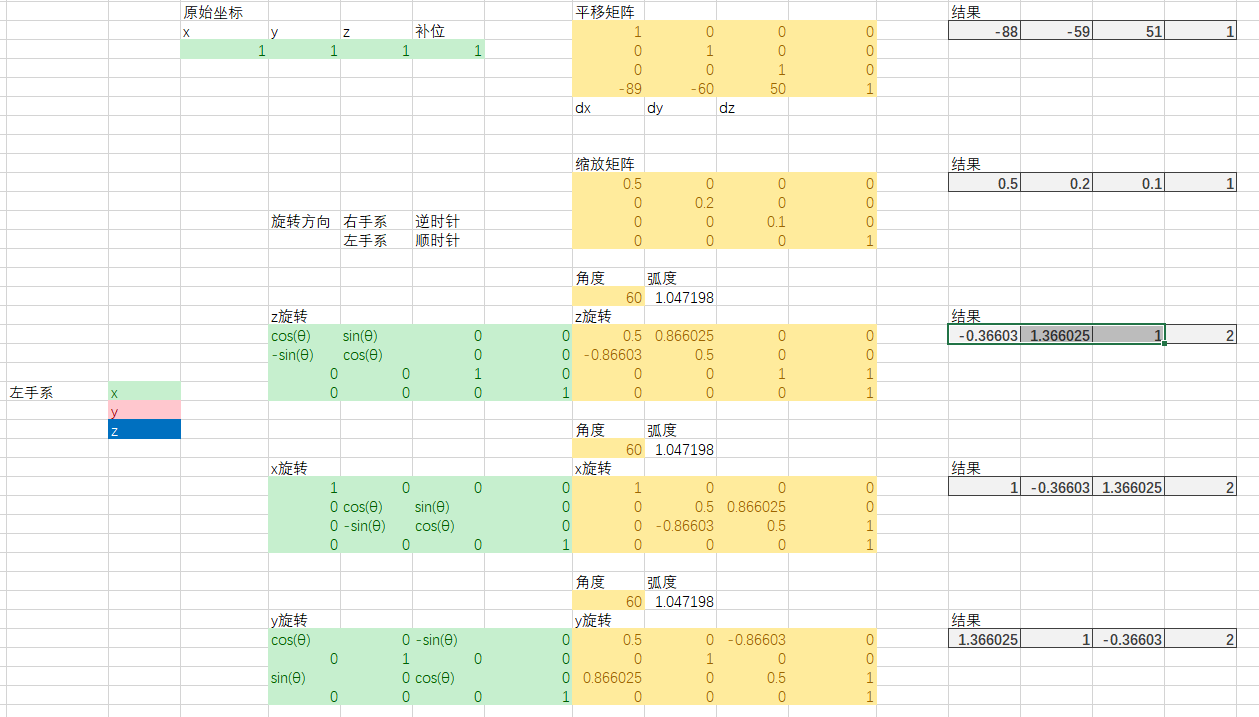
使用矩阵来做位移,旋转,缩放操作:
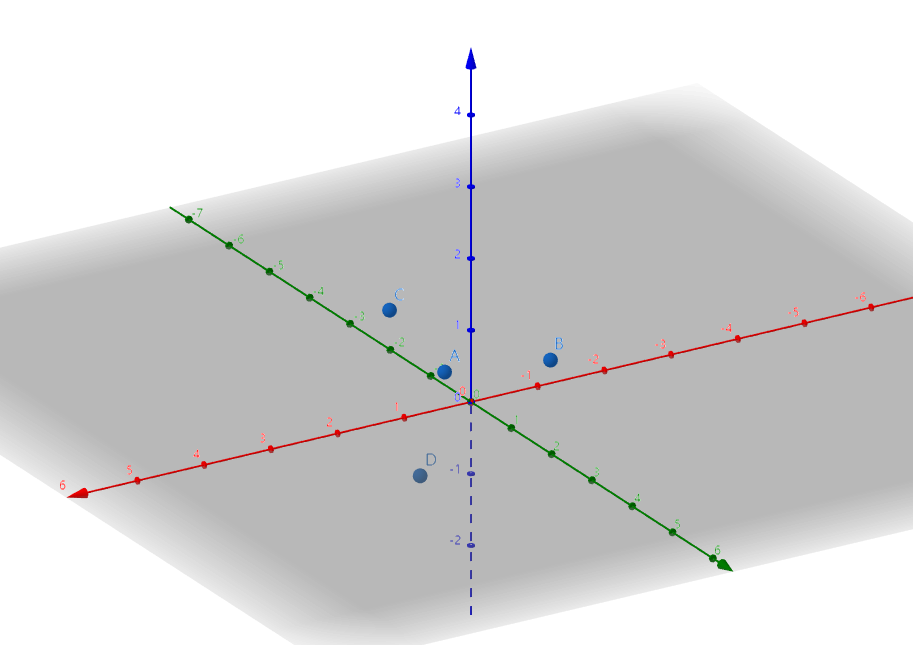
坐标系上的位置:
4.克罗内克积(Kronecker Product)
克罗内克积是两个任意大小的矩阵间的运算,符号记作 。克罗内克积也被称为直积或张量积.以德国数学家利奥波德·克罗内克命名。
$$
\left|
\begin{matrix}
a11 & a12 \
a21 & a22 \
\end{matrix} \right| \bigotimes
\left|
\begin{matrix}
b11 & b12 \
b12 & b22 \
\end{matrix} \right|
= \left|
\begin{matrix}
a11b11 & a11b12 & a12b11 & a12b12 \
a11b21 & a11b22 & a12b21 & a12b22 \
a21b11 & a11b12 & a22b21 & a22b22 \
a21b21 & a21b22 & a22b21 & a22b22 \
\end{matrix} \right|
$$
6.欧拉角
先使用左手坐标系。
摆上一个飞机,y轴指天,x轴右,z轴向前。
- 飞机围绕着y轴旋转,叫做偏离航向(heading),偏航角(Yaw),航向角(Heading Angle);
- 飞机围绕着x轴旋转,叫做俯仰(pitch)调整,俯仰角(Pitch),偏斜角(Angle of Declination);
- 飞机围绕着z轴旋转,叫做滚转(bank)调整,翻滚角(Roll);
4.万向节死锁
在使用欧拉角来做旋转的时候,当我们将俯仰数值调整成±90°的时候。再去调整偏航、滚转的时候,保持一致。本来有3个维度上的旋转,最后只能从两个维度上调整。
欧拉角和后面说的四元数的插值计算也是存在一些差异的。
插值的时候,四元数可以使用球形插值SLerp,在空间上转换的时候,会在球面上画弧线。欧拉角是按照轴来做的。
2.欧拉恒等式
我还没有理解到这个意义。
$$\cos\varphi+i\sin\varphi=e^{i\varphi}$$
当
$$\varphi=\pi$$
推导
$$e^{i\pi}+1=0$$
5.四元数
1.概述
四元数是1843年发明的。爱尔兰数学家哈密顿(William Rowan Hamilton,1805-1865)。
四元数运算在电动力学与广义相对论中有广泛的应用。四元数可以用来取代张量表示。有时候采用带有复数元素之四元数会比较容易,导得结果不为除法代数之形式。然而亦可结合共轭运算以达到相同的运算结果。
从概念上来看,就是在数学里面定义对于-1开方最后获取的值。
$$i=\sqrt{-1}$$
复数是对实数集合的一种扩展。
在游戏开发应用里面,四元数用于做旋转计算。所以最好先将矩阵搞清楚。复数已经是一种数学工具了,在实际世界里面不能表示什么意义。
四元数不是专门给3D图形学设计的,但是能用在3D图形学里面:
- [3D相机控制]
- 压缩存储
- 平滑3D插值
复数定义
$$z=a+b*i$$
a是实部,b是虚部;
复数与标量相乘、相除
$$kZ_{1}=k(a+bi)=ka+(kb)*i$$
复数加减
$$Z_{1}=(a+b*i)$$
$$Z_{2}=(c+d*i)$$
$$Z_{1}+Z_{2}=(a+bi)+(c+di)=((a+c)+(b+d)*i)$$
$$Z_{1}-Z_{2}=(a+bi)-(c+di)=(a-c)+(b-d)i$$
复数加法恒等元
复数恒等元
$$(0+0*i)$$
复数除法
$$Z_{1}/Z_{2}=\frac{(a+bi)}{(c+di)}$$
推算的时候,需要分子和分母都乘上分母的共轭复数。
共轭(Conjugate)
两个实部相等,虚部互为相反数的复数互为共轭复数(conjugate complex number)。(当虚部不等于0时也叫共轭虚数)复数z的共轭复数记作 (z上加一横,英文中可读作Conjugate z,z conjugate or z bar),有时也可表示为
$$Z^*=\overline{Z}$$
$$Z=(a+bi)$$
$$\overline{Z}=(a-bi)$$
计算负数的模
$$\left||p\right||=\sqrt{p\overline{p}}$$
中划线
$$\underline{\text{下划线}}$$
$$\overline{\text{上划线}}$$
参考
- [1] markdown公式
- [2] windows10输入公式
- [3] 三角函数
- [4] 图形计算器
- [5] GeoGebra 数学
- [6] GeoGebra-Classic
- [7] Google-mathfun库
- [8] GAMES101-现代计算机图形学入门-闫令琪
- [9] NumPy教程
- [10] 2d/3dPython库
- [11] markdown公式2
- [12] markdown公式3
- [13] B站矩阵
- [14] 极坐标
- [15] 3d数学笔记
- [16] 妈咪说-复数
- [17] GeoGebra-Classic-Win版本
- [18] 复数运算规则
- [19] 欧拉角和四元数的理解
- [20] 欧拉角和万向节死锁
- [21] 万向节死锁实例
- [22] 在线LaTex工具
- [23] 3D数学基础图形与游戏开发-视频